Pierre Renaud
Professeur des universités – Professor

Deputy Director, ICube laboratory
Mission Head for valorization and platforms, ICube
Contact
INSA Strasbourg
24, Bd de la Victoire, 67084 Strasbourg
IHU Strasbourg, RDH-ICUBE
1, Place de l’hôpital, 67091 Strasbourg
Teaching activities
Main courses: Industrial robotics, Compliant Mechanisms, Robot Calibration, Computer-assisted Surgery, Design for Additive Manufacturing, Automatic Control, Applied Mechanics, Mechatronics Project.
Moodle access here.
Research activities
Keywords: Medical and Surgical Robotics, Robotics, Mechatronics, Additive Manufacturing, Mechanical Design, Parallel Mechanisms, Compliant mechanisms, Tensegrity Mechanisms
Context: The Robotics, Data Science and Healthcare Technologies group (website) is part of the ICube laboratory. The group has 20+ years of experience in Computer Assisted Medical Interventions. It is part of TIRREX, a national network of robotic platforms funded by the “Investissements d’Avenir” program.
Our lab is mainly located at IHU Strasbourg, an institute specialized in the development of new surgical technologies
Research themes:
– Mechatronics for medical robotics: new robotic designs and architectures thanks to mechatronic design
– Development of compliant and soft systems: from their analysis to their design and manufacturing
– Additive manufacturing for robotics: use of additive manufacturing for sensing, actuation and robot integration (More info on IRIS – Equipex platform here)
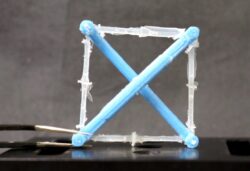
– Cable driven mechanisms and tensegrities: from modeling to their design
Portfolio of ACTIVE projects
Organic Robotics: Material, Architecture and Embodied Intelligence – Re-thinking softness of robots and design new forms of robotics more adapted to our environments, as a vector of “acceptability” and even “desirability”. Scientific coordinator of this 8-year project, more information here.

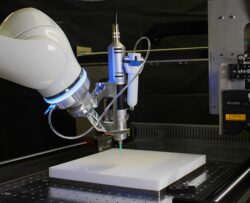
Silicone Printing and design of soft robots: opening new avenues for the production of soft robots by developing the silicone printing technology, with BIFASI active nozzle to simplify silicone DIW, robotized printing with RAMSAI project, and also the design of soft robots by developing design methods.

Robotic assistance for image-guided procedures: Design of solutions using multi-material robot components for HIFU therapies (Joint lab with Image Guided Therapy company), and percutaneous procedures. Design of the SPIRIT device (Simple Printed Interactive Robot for Interventional Therapy) using multi-material additive manufacturing and a compliant structure. Interreg SPIRITS project presented here.
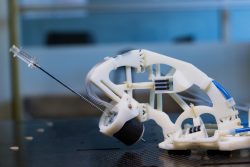
Origami-based reconfigurable robots for resilient and multi-modal robot locomotion: Development of new actuated origami-based structure for locomotion and resilience. RESISROB and ORIGABOT ANR Projects with ISM, Marseille, Femto-ST, Besançon, LS2N Nantes. Information here.
PREVIOUS projects



Continuum robotics for medical and surgical applications: Design of continuum robots. For in vivo inspection of olfactory cells in the NEMRO project (more info here), design and control of concentric tube robots and magnetic concentric tube robots. Sensing for shape estimation of continuum robots. Support of ANR, NEMRO project, Labex CAMI, H2020 ITN ATLAS.

Flexible robotics for microbiota evaluation, FLEXTER project: Combination of additive manufacturing and compliant mechanisms for the design of new devices related to microbiota investigation. Support of Labex CAMI, TIMC-Imag, ICube and LIRMM partners of the project .


Robotized Transcranial Magnetic Stimulation: Design of a robotic system with industriel transfer through the creation of Axilum Robotics. Co-founder, member of the Scientific Committee of Axilum Robotics.

Robotic assistance for interventional radiology on the prostate: Design of cable-driven mechanisms offering MR-compatibility with instrumented structure for fine cable tension management. Collaboration with the Department of Radiology of the University Hospital of Strasbourg.

Robotic assistance for Magnetic Resonance Elastography: Needle-based elastography for local mechanical excitation of tissues in quantitative elastography. PZT-based design using additive manufacturing with original needle clamping system. Support of IHU Strasbourg.

Robotic assistance for beating heart surgery: Active cardiac stabilization for beating heart coronary artery bypass grafting with vision-based control of compliant mechanisms.
Resume
- 2013 – present: Professor at Institut National des Sciences Appliquées de Strasbourg. – Research at ICube – RDH
- 2010 – 2011: Visiting Associate Professor at Stanford University (USA). Research at the Biomimetics and Dexterous Manipulation Lab (BDML). Fulbright Fellow.
- 2008 – 2013: Associate Professor at Institut National des Sciences Appliquées de Strasbourg
- 2004 – 2007 Associate Professor at INSA Strasbourg. Research at Laboratoire de Génie de la Conception (EA3938)
- 2003 – 2004 Postdoc position at Laboratoire d’Informatique, de Robotique et de Microélectronique de Montpellier, France (LIRMM)
- 2000 – 2003 Ph.D. student at LaRAMA – LASMEA, Clermont-Ferrand, France. PhD thesis: “Towards vision-based kinematic calibration of parallel mechanisms”. Lecturer at Institut Français de Mécanique Avancée (IFMA)
- 1999 – 2000 M.Sc. “Mechanics and Materials” from ENS Cachan – Training Period at LMT Cachan
- 1998 – 1999 Agregation in Mechanical Engineering
- 1996 – 1998 B.Sc. in Mechanical Engineering – ENS Cachan, France. Training Period at UC Santa Barbara (USA)
Publications
Complete list of publications here. Only journal publications are reported here.
International journals
- [2026] T. Simoncelli , B. Wach, L. Barbé, F. Geiskopf, L. Rubbert, Pierre Renaud, An active nozzle with variable shape: Introduction and exploration of impact for silicone DIW, Additive Manufacturing, 121, pp.105169. ⟨10.1016/j.addma.2026.105169⟩
- [2026] J. Sand , F. Geiskopf , S. Abdelaziz , Ph. Poignet , P. Renaud, Design and manufacturing method for the production of soft tensegrity structures and mechanisms, Mechanism and Machine Theory, 223, pp.106405. ⟨10.1016/j.mechmachtheory.2026.106405⟩
- [2025] L. Mosser , L. Rubbert , L. Barbé , P. Renaud, Instrumentation of silicone liquid deposition modeling by extrusion: Introduction and evaluation of laser profilometry and associated indicators for supervision, Additive Manufacturing, 105, pp.104779. ⟨10.1016/j.addma.2025.104779⟩
- [2024] J. Sand , F. Geiskopf , S. Abdelaziz , Ph. Poignet , P. Renaud, Impact of the bars behavior on the design of soft tensegrities, Journal of Mechanisms and Robotics, 2024, 16 (10), pp.104501. ⟨10.1115/1.4064572⟩.
- [2023] L. Mosser, L. Barbé, L. Rubbert, P. Renaud, Towards Automatic Design of Soft Pneumatic Actuators: Inner Structure Design Using CNN Model and Bézier Curve-Based Genetic Algorithm, IEEE Robotics and Automation Letters, 8(10).
- [2022] M. Ben Salem, G. Aiche, Y. Haddab, L. Rubbert, P. Renaud, Microbiota Sampling Capsule : Design, Prototyping and Assessment of a Sealing Solution Based on a Bistable Mechanism. ASME Journal of Medical Devices
- [2022] J. Berre, F. Geiskopf, L. Rubbert & P. Renaud, Towards the design of Kresling tower origami as a compliant building block. ASME Journal of Mechanisms and Robotics
- [2022] Q. Peyron, Q. Boehler, P. Rougeot, P. Roux, B. Nelson, N. Andreff, K. Rabenorosoa, & P. Renaud. Magnetic concentric tube robots : Introduction and analysis. International Journal of Robotics Research, 41(4).
- [2022] Pfeil, A., Siegfarth, M., Pusch, T., Barbé, L., Geiskopf, F., & Renaud, P. Design and Experimental Characterization of Hydraulically Actuated Revolute Joint Based on Multimaterial Additive Manufacturing. ASME Journal of Mechanical Design, MD-21-1465, 144(5): 055001.
- [2022] Sahu, S., Tamadon, I., Rosa, B., Renaud, P., & Menciassi, A. A Spring-based Inductive Sensor for Soft and Flexible Robots. IEEE Sensors Journal, 22(20).
- [2021] Rubbert, L., Schuler, F., Gayral, T., de Wild, M., & Renaud, P. Development of models for additively manufactured actuators using compliant Wren mechanism. Precision Engineering, 72, 304‑314.
- [2021] Pfeil, A., Barbé, L., Geiskopf, F., Cazzato, R., & Renaud, P.. Workflow-Based Design and Evaluation of a Device for CBCT-Guided Biopsy. ASME Journal of Medical Devices, 15(3), 031004.
- [2021] Quispe, J., Bolopion, A., Renaud, P., & Regnier, S. Enhancing swimming and pumping performance of helical swimmers at low Reynolds numbers. IEEE Robotics and Automation Letters, 6(4).
- [2021] Sahu, S., Sozer, C., Rosa, B., Tamadon, I., Renaud, P., & Menciassi, A. Shape Reconstruction Processes for Interventional Application Devices : State of the Art, Progress, and Future Directions. Frontiers in Robotics and AI.
- [2021] Schmitt, F., Piccin, O., Renaud, P., Bayle, B., & Barbé, L. (2021). Inverted Honeycomb Cell as a Reinforcement Structure for Building Soft Pneumatic Linear Actuators. ASME Journal of Mechanisms and Robotics, 13, 1‑28.
- [2021] L. Riegel, G. Hao, P. Renaud (2020), Vision-based micro-manipulations in simulation, Microsystem Technologies, Springer
- [2020] J. Begey, M. Etievant, J. Quispe, A. Bolopion, M. Vedrines, J. Abadie, S. Regnier, N. Andreff, P. Renaud. A Manipulability Criterion for Magnetic Actuation of Miniature Swimmers with Flexible Flagellum, IEEE Robotics and Automation Letters, Vol. 5(3):4891-4898, doi: 10.1109/LRA.2020.3004792
- [2020] J. Begey, M. Vedrines, N. Andreff, P. Renaud. Selection of Actuation Mode for Tensegrity Mechanisms: the Case Study of the Actuated Snelson Cross, Mechanism and Machine Theory, Elsevier, Vol. 152, 2020. doi: 10.1016/j.mechmachtheory.2020.103881
- [2020] J. Begey, M. Vedrines, P. Renaud (2020). Design of Tensegrity-Based Manipulators: Comparison of Two Approaches to Respect a Remote Center of Motion Constraint, IEEE Robotics and Automation Letters, Vol. 5(2):1788-1795, doi: 10.1109/LRA.2020.2969190
- [2020] C. Girerd, T. Schlinquer, N. Andreff, P. Renaud, K. Rabenorosoa. Design of Concentric Tube Robots using Tube Patterning for Follow-the-Leader Deployment, Journal of Mechanisms and Robotics, American Society of Mechanical Engineers, Vol. 13(1), doi: 10.1115/1.4047983
- [2020] M. Siegfarth, T. Pusch, A. Pfeil, P. Renaud, J. Stallkamp (2020). Multi-material 3D printed hydraulic actuator for medical robots, Rapid Prototyping Journal, Emerald, 26/6:1019-1026, doi: 10.1108/RPJ-07-2019-0205
- [2019] M. Ben Salem, H. Hussein, G. Aiche, Y. Haddab, P. Lutz, L. Rubbert, P. Renaud. Characterization of bistable mechanisms for microrobotics and mesorobotics, Journal of Micro-Bio Robotics, Springer, Vol. 15(1):65–77., doi: 10.1007/s12213-019-00113-3
- [2019] C. Girerd, A. Kudryavtsev, P. Rougeot, P. Renaud, K. Rabenorosoa, B. Tamadazte. SLAM- based Follow-the-Leader Deployment of Concentric Tube Robots, IEEE Robotics and Automation Letters, Vol. 5(2):548-555. ( IF : 3.608 ), doi: 10.1109/LRA.2019.2963821
- [2019] Q. Peyron, K. Rabenorosoa, N. Andreff, P. Renaud, “A numerical framework for the stability and cardinality analysis of concentric tube robots: Introduction and application to the follow-the-leader deployment”, Mechanism and Machine Theory, Vol. 132, pp. 176-192.
- [2018] A. Pfeil, R.L. Cazzatto, L. Barbé, P. de Marini, J.B. Chiang, J. Garnon, P. Renaud, A. Gangi, « Robotically Assisted CBCT-Guided Needle Insertions: Preliminary Results in a Phantom Model”, Cardiovascular and Intervantional Radiology, Vol. 42(2), pp. 283-288.
- [2018] B. Rosa, B. Dahroug, B. Tamadazte, K. Rabenorosoa, P. Rougeot, N. Andreff, P. Renaud, “Online Robust Endomicroscopy Video Mosaicking Using Robot Prior”, IEEE Robotics and Automation Letters, Vol 3(4), pp. 4163-4170.
- [2018] Q. Peyron, Q. Boehler, K. Rabenorosoa, B.J. Nelson, P. Renaud, N. Andreff, “Kinematic analysis of magnetic continuum robots using continuation method and bifurcation analysis”, IEEE Robotics and Automation Letters, Vol 3(4), pp. 3646-3653.
- [2018] C. Girerd, T. Lihoreau, K. Rabenorosoa, B. Tamadazte, M. Benassarou, L. Tavernier, L. Pazart, E. Haffen, N. Andreff, P. Renaud, “In Vivo Inspection of the Olfactory Epithelium: Feasibility of Robotized Optical Biopsy”, Annals of Biomedical Engineering, Vol. 46(11), pp. 1951-1961.
- [2018] Q. Boehler, M. Vedrines, S. Abdelaziz, P. Poignet, P. Renaud, “Synthesis method for the design of variable stiffness components using prestressed singular elastic systems”, Mechanism and Machine Theory, Vol. 121, pp. 598-612.
- [2017] L. Rubbert, I. Charpentier, S. Henein, P. Renaud, “Higher-order continuation method for the rigid-body kinematic design of compliant mechanisms”, Precision Engineering, vol. 50, pp. 455-466.
- [2017] Q. Boehler, S. Abdelaziz, M. Vedrines, P. Poignet, P. Renaud, “From modeling to control of a variable stiffness device based on a cable-driven tensegrity mechanism”, Mechanism and Machine Theory, vol 107, pp. 1-12.
- [2017] S. Abdelaziz, L. Barbé, P. Renaud, M. de Mathelin and B. Bayle, “Control of Cable-driven Manipulators in the Presence of Friction”, Mechanism and Machine Theory, vol. 107, pp. 139-147.
- [2016] G. Hentz, I. Charpentier, P. Renaud, “Higher-order continuation for the determination of robot workspace boundaries”, Comptes Rendus Mécanique, Vol. 344, n°2, pp. 95-101, 2016.
- [2015] N. Corbin, J. Vappou, É. Breton, Q. Boehler, L. Barbé, P. Renaud, M. de Mathelin. “Interventional MR Elastography for MRI-Guided Percutaneous Procedures”, Magnetic Resonance in Medicine, DOI: 10.1002/mrm.25694, pages 1110-1118, Volume 75, n° 3.
- [2015] M. Nierenberger, S. Lecler, P. Pfeiffer, F. Geiskopf, M. Guilhem, P. Renaud. “Additive manufacturing of a monolithic optical force sensor based on polarization modulation”, Applied Optics, Optical Society of America, Vol. 55, n°22, pp. 6912-6918.
- [2015] A. Bruyas, F. Geiskopf, P. Renaud, “Design and Modeling of a Large Amplitude Compliant Revolute Joint: the Helical Shape Compliant Joint”, ASME Journal of Mechanical Design, 2015.
- [2015] Q. Boehler, I. Charpentier, M. Vedrines, P. Renaud, “Definition and Computation of Tensegrity Mechanism Workspace”, ASME Journal of Mechanisms and Robotics, Vol. 7, n°4, pp. 044502.
- [2015] S. Elayaperumal, M.R. Cutkosky, P. Renaud, B. Daniel. A Passive Parallel Master–Slave Mechanism for Magnetic Resonance Imaging-Guided Interventions, ASME Journal of Medical Devices 9(1), pp. 011008
- [2014] S. Ryu, Z. Quek, J. Koh, P. Renaud, R. Black, B. Moslehi, B. Daniel, K. Cho, M. Cutkosky, Design of an Optically Controlled MR-compatible Active Needle, IEEE Transactions on Robotics, Vol. 31, n°1, pp. 1-11
- [2014] S. Abdelaziz, L. Esteveny, L. Barbé, P. Renaud, B. Bayle, M. de Mathelin, “Design of an MRI-compatible Cable-driven Manipulator with Original Instrumentation and Synthesis Methods”, ASME Journal of Mechanical Design, Vol. 136, n°9, pp. 091006-091006-10.
- [2014] L. Rubbert, S. Caro, J. Gangloff, P. Renaud, “Using Singularities of Parallel Manipulators to Enhance the Rigid-Body Replacement Design Method of Compliant Mechanisms”, ASME Journal of Mechanical Design, vol. 135, n°5, pp. 0511010.
- [2012] L. Rubbert, P. Renaud, S. Caro, J. Gangloff, “Design of a compensation mechanisms for an active cardiac stabilizer based on an assembly of planar compliant mechanisms”, Mechanics & Industry, Vol. 15, n°2, pp. 147-151
- [2011] L. Rainero, P. Renaud, B. Bayle, L. Goffin, C. Lebossé, M. de Mathelin, J. Foucher, “Design and Evaluation of a Robotic System for Transcranial Magnetic Stimulation”, IEEE Transactions on Biomedical Engineering, pp. 805-815, Vol. 59, n°3.
- [2011] W. Bachta, P. Renaud, E. Laroche, A. Forgione, J. Gangloff “Active stabilization for Robotized Beating Heart Surgery”, IEEE Transactions on Robotics, Volume 27, n°4, pp. 757-768.
- [2011] W. Bachta, P. Renaud, E. Laroche, J. Gangloff, “The Cardiolock Project: Design of an Active Cardiac Stabilizer for Cardiac Surgery”, ASME Journal of Mechanical Design, Vol. 133, n°7, pp. 071002-1–071002-10, July 2011.
- [2011] C. Lebossé, P. Renaud, B. Bayle, M. de Mathelin, “Modeling and evaluation of low cost force sensors”, IEEE Transactions on Robotics, Volume 27, Issue 4, pp. 815-822, June 2011.
- [2011] S. Abdelaziz, L. Esteveny, P. Renaud, B. Bayle, L. Barbé, M. de Mathelin, A. Gangi, “Design Considerations for a Novel MRI Compatible Manipulator for Prostate Cryoablation ”, International Journal of Computer Assisted Radiology and Surgery, April 2011.
- [2009] L. Rubbert, P. Renaud, W. Bachta, J. Gangloff, “Compliant Mechanisms for an Active Cardiac Stabilizer: Lessons and New Requirements in the Design of a Novel Surgical Tool”, Mechanical Sciences, Vol. 2, pp. 119-127.
- [2008] W. Bachta, P. Renaud, L. Cuvillon, E. Laroche, A. Forgione, J. Gangloff, « Motion Prediction for Computer-Assisted Beating Heart Surgery », IEEE Transactions on Biomedical Engineering, Vol. 11, n°11, pp. 2561-2563.
- [2006] W. Bachta, P. Renaud, E. Laroche, A. Forgione, J. Gangloff, « Cardiolock: an active cardiac stabilizer – First in vivo experiments using a new robotized device », Computer Aided Surgery, Vol. 13, n°5, pp. 243-254.
- [2006] P. Renaud, A. Vivas, N. Andreff, P. Poignet, P. Martinet, F. Pierrot, O. Company, « Kinematic and Dynamic Identification of Parallel Mechanisms », Control Engineering Practice, 14(9), pp. 1099-1109.
- [2005] P. Renaud, N. Andreff, J.-M. Lavest, M. Dhome, « Simplifying the Kinematic Calibration of Parallel Mechanisms Using Vision-Based Metrology », IEEE Transactions on Robotics, Vol. 22, n°1, pp. 12-22.
- [2004] P. Renaud, N. Andreff, G. Gogu, P. Martinet, « Kinematic calibration of parallel mechanisms: a novel approach using legs observation », IEEE Transactions on Robotics, Vol. 21, n°4, pp. 529-538.
- [2004] N. Andreff, P. Renaud, P. Martinet, F. Pierrot, “ Vision-based kinematic calibration of an H4 parallel mechanism: practical accuracies “, Industrial Robot, Vol. 31, n°3, pp. 273-283, march 2004.