Lennart Rubbert
Maître de conférences – département mécanique
 Professeur principal des étudiants en mécatronique (MIQ) 5e année
Professeur principal des étudiants en mécatronique (MIQ) 5e année
Personne contact SST–PSSM–VSSH
Bureau: T1.23 (RDC, plate-forme mécanique, mezzanine)
Activités pédagogiques
- Asservissement continu – Automatique 2 (GM4 PL4) et Automatique (FIP-MIK3)
- Étude des systèmes mécatroniques – ESM2 (MIQ4)
- Conception et optimisation de mécanismes à guidages flexibles – Mécanismes compliants (Parcours 4 – 5A) et Modélisation et Optimisation Numériques des Structures (Master PAIP, Parcours 2 – 5A)
- Conception, modélisation, analyse, et commande de robots – Projet Intégration mécatronique (Parcours 4) – Introduction à la robotique (électifs STH1)
- Projet MIQ S6 (MIQ3)
Activités de recherche
Unité de recherche ICube – Robotics, Data science and Healthcare technologies (RDH)
Projets et thèses en cours:
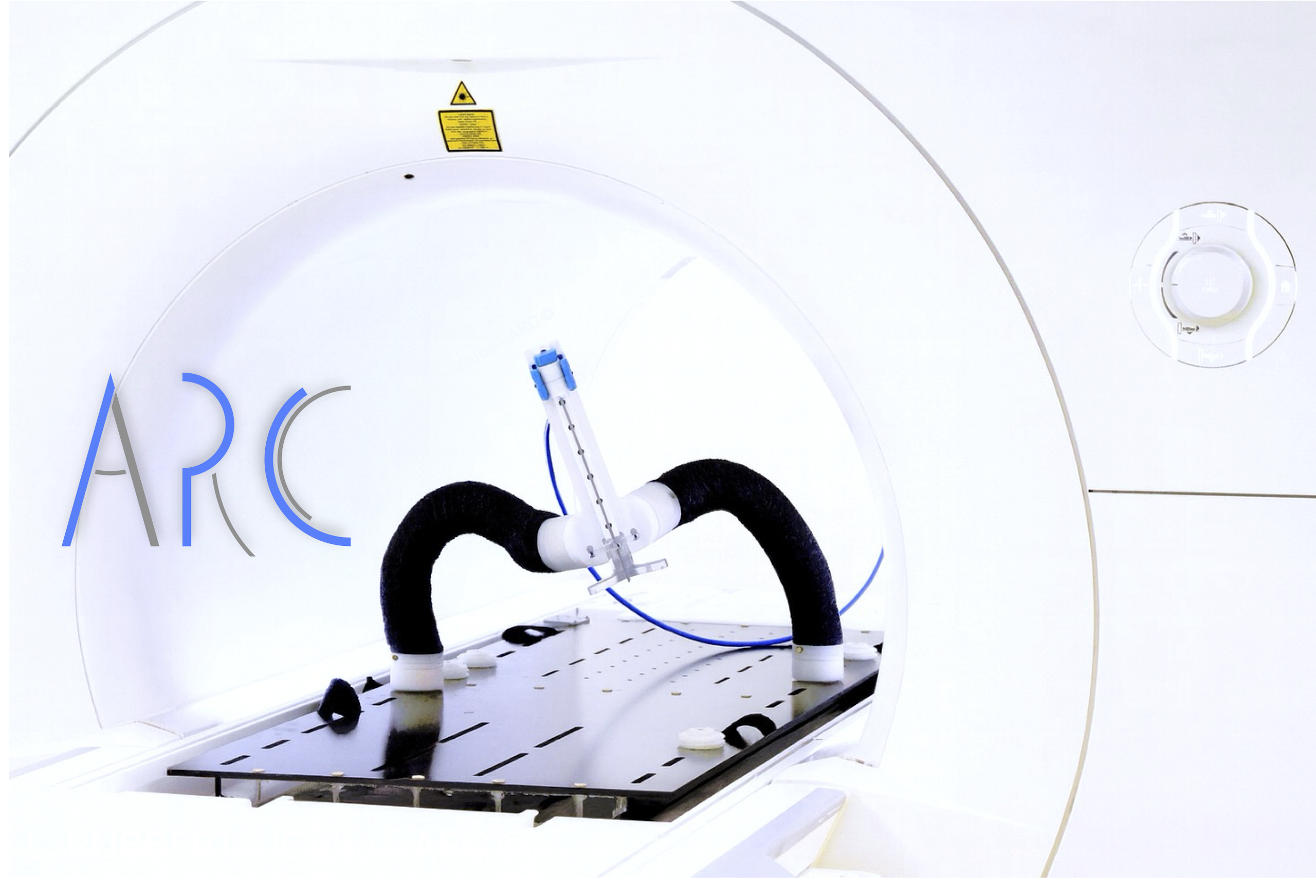
- ARC (maturation SATT Conectus): https://www.arc-medtech.com
- BIFASI (Maturation SATT Conectus)
- PEPR-O2R-AS1 : https://www.pepr-o2r.fr/projet/materiau-architecture-intelligence-incarne/
- Resirob (ANR), thèse: Matéo DRUART: https://resirob.cnrs.fr/
- DECO (ANR) : https://deco.gricad-pages.univ-grenoble-alpes.fr/
Publications
Ouvrage paru en 2017 et disponible à la bibliothèque de l’INSA Strasbourg et en open access : The art of flexure mechanism design
Liens internet
Contact
Tél : +33(0) 3 88 14 47 00